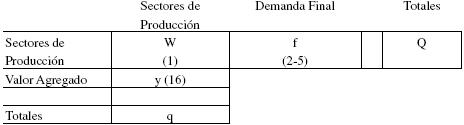
A fin de presentar en las siguientes líneas la esencia del modelo de Insumo–Producto, imaginemos una economía sin comercio exterior y sin impuestos, para simplificar la exposición. Pensemos en una matriz insumo–producto esquemática como la que se muestra a continuación (véase Leontief, 1986 y Millery Blair, 1985).
Donde el elemento típico de W es Wij, que representa las ventas del sector i al j, f es un vector columna que muestra las ventas del sector i a la demanda final y y es un vector hilera que muestra los pagos del sector j a los factores de producción.
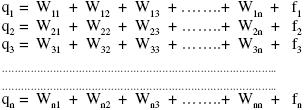
Entonces, la matriz insumo producto se puede representar alternativamente como:
que no es más que una representación de la matriz insumo producto en términos de flujos.
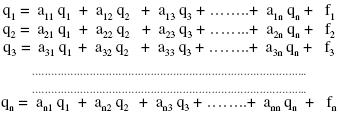
Definamos ahora Wij = aij qj , es decir el coeficiente aij = Wij / qj , y tenemos:
que, expresado en forma matricial, se reduce a:
q = Aq + f
donde la matriz A es la matriz de coeficientes cuyo elemento típico es aij.
Hasta ahora, el sistema no es más que una forma contable de representación de flujos en la matriz de Insumo–Producto y no se ha postulado ningún comportamiento económico. Sin embargo, si se piensa en este sistema como un sistema de ecuaciones que representa el funcionamiento de una economía y se hace el supuesto de que los sectores operan con funciones de producción que no permiten sustituibilidad entre insumos (coeficientes aijfijos), podemos entonces imaginar que el sistema describe la formación de la oferta y demandas. Se tiene entonces la representación de un modelo económico en el que los precios de los factores son fijos.
Este sistema tiene la siguiente solución:
donde la matriz B es conocida como la matriz inversa de Leontief o matriz de multiplicadores (análoga al multiplicador keynesiano).
La matriz B = (I –A)–1 es fundamental en el análisis insumo–producto, pues muestra los impactos totales de la demanda de producto de cada sector en el resto de los sectores. Es decir, esta matriz tiene características análogas a las del multiplicador keynesiano pues permite incorporar la interdependencia tecnológica del sistema productivo y rastrear la generación de la demanda final hacia atrás en el sistema. Entonces permite calcular cuánta producción se requiere para atender diversos niveles de demanda final y, en consecuencia, cómo deberían cambiar los niveles de producción para satisfacer esos cambios en la demanda final, los que pueden provenir de, por ejemplo, aumentos en los montos de inversión, pública y/o privada, además de otros componentes de la demanda final. Nótese que, en la medida en que se pueden estimar los niveles de producción requeridos en todos los sectores para satisfacer el cambio en la demanda final, se pueden también estimar los requerimientos de insumos, empleo e ingreso de todos los sectores.

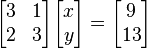
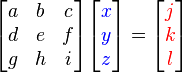
 es un sistema de ecuaciones.
es un sistema de ecuaciones.  es la matriz de coeficientes del sistema,
es la matriz de coeficientes del sistema,  es el vector columna de las incógnitas y
es el vector columna de las incógnitas y  es el vector columna de los términos independientes. Entonces la solución al sistema se presenta así:
es el vector columna de los términos independientes. Entonces la solución al sistema se presenta así:
 es la matriz resultante de reemplazar la j-ésima columna de
es la matriz resultante de reemplazar la j-ésima columna de 


 ,
,  ,
,  pueden ser encontradas como sigue:
pueden ser encontradas como sigue:




 serían:
serían:












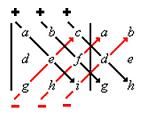

 = a 11 a 22 − a 12 a 21
= a 11 a 22 − a 12 a 21
 =
= =
=






